


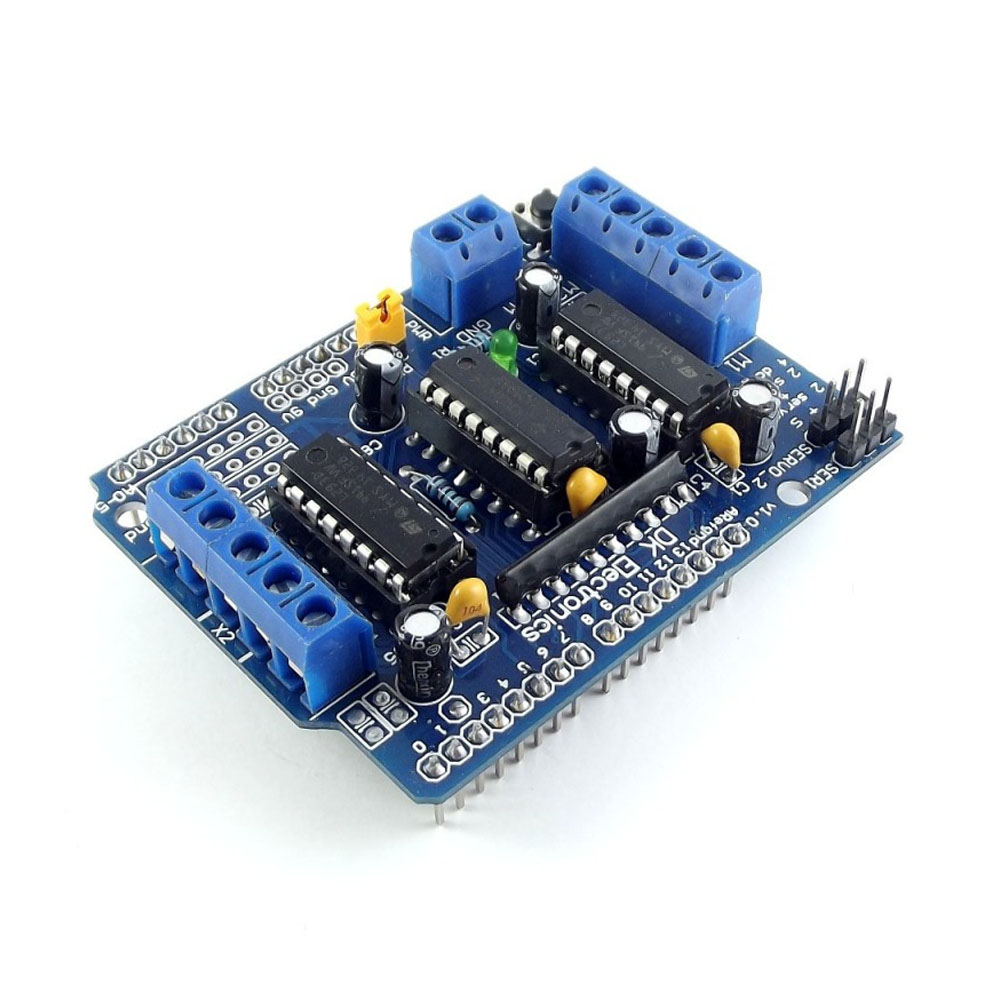
SHIELD DE MOTORES MOTOR ARDUINO L293
Articulo Nuevo 187 vendido
ASG2566
MXN $99.01
Características
Shield de motores con 4 puente-H’s completos, basada en dos L293D, puede manejar 4 cargas inductivas de 0.6 A por canal (4 relés, 4 solenoides, 4 motores DC ó 2 motores paso a paso unipolares o bipolares), permite controlar velocidad y dirección de giro en motores. También provee conector para 2 servos de 5 V. ------------------------- ESPECIFICACIONES TÉCNICAS * Incorpora 2 circuitos integrados L293D proporcionando 4 puentes-H completos * Protección contra sobre carga térmica * Diodos de protección contra voltajes inversos generados por las cargas inductivas * 4 canales (M1, M2, M3 y M4) para controlar igual número de cargas inductivas como motores DC, solenoides, relés, ó 2 motores paso a paso unipolares o bipolares de entre 4.5 V y 25 V * En el caso de motores es posible controlar tanto su velocidad como su dirección de giro * Control de velocidad de motores DC con resolución de 8 bits * Control de motores paso a paso con 1 y 2 bobinas en modo sencillo, doble (mayor torque), intercalado (medio paso) y micro pasos 2 conectores independientes para controlar 2 servos pequeños de 5 V (Pines digitales 9 y 10) * Corriente máxima continua en cada una de las salidas M1, M2, M3 y M4: 600 mA (0.6 A) * Corriente máxima pico no repetitivo en cada una de las salidas M1, M2, M3 y M4: 1.2 A * Resistores de pull-down que mantienen los motores deshabilitados durante el encendido * Requiere fuente externa para la alimentación de las cargas en las salidas M1, M2, M3 y M4. Puede empleada la fuente externa conectada a la placa Arduino o a la shield con selección mediante el jumper “PWR” * Bloques de terminales de tornillo para calibres 18 a 26 AWG * Botón de reset para la placa Arduino * Compatibilidad probada con Arduino Diecimila, Duemilanove, UNO y Mega 1280 & 2560 ADVERTENCIAS Las salidas para los servos toman su alimentación directamente de los 5 V de la placa Arduino, por lo que esta bien utilizar pequeños servos tipo hobby. Si quiere emplear servos grandes de alto consumo de corriente, se recomienda que corte la pista alimentación V+ en la shield ó el cable positivo del servo y provea su propia fuente a estos (No olvide conectar las tierras). La alimentación de las 4 salidas para motores u otras cargas inductivas M1, M2, M3 y M4 se tiene que suministrar con una fuente externa. Se puede proveer del jack DC del Arduino (Pin Vin) o del conector de tornillo “EXT_PWR” en la shield; seleccionable mediante el jumper “PWR” (Si el jumper está colocado se utiliza fuente externa del Arduino conectada al jack DC, y si no está colocado se utiliza el conector de tornillo de la shield). Si utiliza el conector de tornillo de la shield tenga en cuenta la polaridad, ya que esta entrada no cuenta con diodo de protección de polaridad y una conexión errada resultará en el daño de la shield y la placa Arduino. Tampoco conecte la salida regulada de 5 V ó 3.3 V de la placa Arduino a esta entrada.
¡Mas productos!
MXN $218.14
MXN $247.82

MXN $99.01
MXN $49.40

MXN $81.32

MXN $49.40
MXN $99.01
MXN $108.97